
【遥感微课堂】水深反演与水面船只识别
分享
-
2016-06-04
下载练习数据:http://vdisk.weibo.com/s/zrSeGYf9hjcmW
下载详细操作文档:http://vdisk.weibo.com/s/zrSeGYf9hjcne
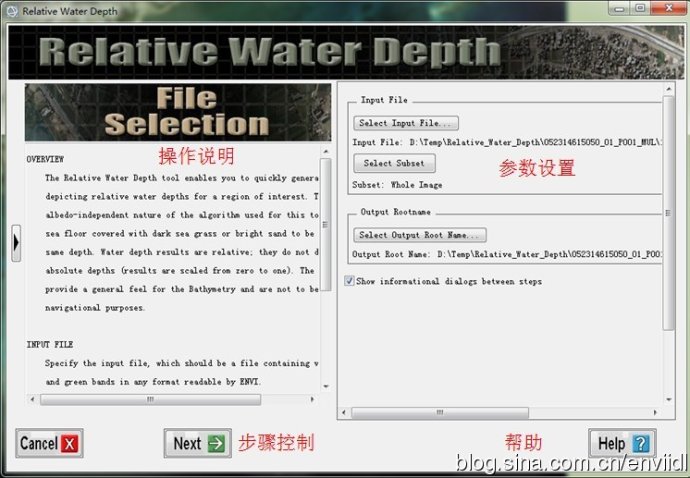
ENVI的SPEAR工具集(Spectral Processing Exploitation and Analysis Resource)是将很多的遥感图像处理过程集成为流程化的操作方式,使得遥感图像处理知识相对薄弱的非专业人员也能利用流程化的工具进行图像处理,图像处理速度也有很大的提高。每一个SPEAR工具的图像处理流程有操作说明,参数设置,帮助和步骤控制按钮,中间生成结果自动保存在默认目录下。
本课堂学习两种工具的使用:SPEAR Relative Water Depth(相对水深量测)和SPEAR Watercraft Finder(船只提取)工具,使用数据为快鸟和WorldView-2多光谱影像。
SPEAR Relative Water Depth工具使用底部反照率独立水深测量算法(bottom albedo-independent Bathymetry algorithm)量测水深,这个算法假设:当深度相同的时候,不管水底是被深色水草或者明亮的沙子覆盖,他们都显示为同一深度。利用实测声纳数据,使用线性回归的方法对结果进行验证,R2 = 0.7221,基本可以满足应用的精度需要。
SPEAR Watercraft Finder工具可以从高分辨率的多光谱数据中识别移动或者静止的船只。该工具的前提是包括近红外波段,船只信息会在水吸收的近红外波段异常聚集,提供两种船只提取算法:
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d01019mjz.html
下载详细操作文档:http://vdisk.weibo.com/s/zrSeGYf9hjcne
ENVI的SPEAR工具集(Spectral Processing Exploitation and Analysis Resource)是将很多的遥感图像处理过程集成为流程化的操作方式,使得遥感图像处理知识相对薄弱的非专业人员也能利用流程化的工具进行图像处理,图像处理速度也有很大的提高。每一个SPEAR工具的图像处理流程有操作说明,参数设置,帮助和步骤控制按钮,中间生成结果自动保存在默认目录下。
本课堂学习两种工具的使用:SPEAR Relative Water Depth(相对水深量测)和SPEAR Watercraft Finder(船只提取)工具,使用数据为快鸟和WorldView-2多光谱影像。
SPEAR Relative Water Depth工具使用底部反照率独立水深测量算法(bottom albedo-independent Bathymetry algorithm)量测水深,这个算法假设:当深度相同的时候,不管水底是被深色水草或者明亮的沙子覆盖,他们都显示为同一深度。利用实测声纳数据,使用线性回归的方法对结果进行验证,R2 = 0.7221,基本可以满足应用的精度需要。
SPEAR Watercraft Finder工具可以从高分辨率的多光谱数据中识别移动或者静止的船只。该工具的前提是包括近红外波段,船只信息会在水吸收的近红外波段异常聚集,提供两种船只提取算法:
- 基于纹理:包含船只的像素能在“均匀背景”下聚集,这就是预期的“纹理”结果。这种方法比较常用,精度也较高。
- 基于2纬散点图:在2纬散点图上手动选择船只像元区域,这种方法适合分析小范围区域,对于大范围区域效果不高。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d01019mjz.html
