
【遥感微课堂】高光谱图像处理和分析
分享
-
2016-06-17
下载练习数据:http://vdisk.weibo.com/s/zrSeGYf9h2k_i
下载详细操作文档:http://vdisk.weibo.com/s/zrSeGYf9h2kXH
光学遥感技术的发展经历了:全色(黑白)—>彩色摄影—>多光谱扫描成像—>高光谱遥感四个历程。高光谱分辨率遥感(HyperspectralRemote Sensing)用很窄(10-2λ)而连续的光谱通道对地物持续遥感成像的技术。在可见光到短波红外波段其光谱分辨率高达纳米(nm)数量级,通常具有波段多的特点,光谱通道数多达数十甚至数百个以上,而且各光谱通道间往往是连续的,因此高光谱遥感又通常被称为成像光谱(Imaging Spectrometry)遥感。
高光谱图像分类很多地方也叫高光谱物质制图(Mapping),主要原理利用反映地物物理光学性质的光谱曲线来识别地物,即利用一种匹配方法,分析已知的波谱曲线(端元波谱)和高光谱图像每个像素波谱曲线(光谱剖面)匹配程度对图像进行分类。高光谱图像分类过程同时也是光谱识别的过程;用已知的波谱曲线去识别图像中的地物,这也是高光谱遥感最大的优点,可用于特定目标的识别和探测,其结果是“有”或者“没有”。
本课堂以航空高光谱数据为例介绍从高光谱的波谱识别过程,包括高光谱数据的预处理(大气校正)、高光谱数据维数判断和降维、端元波谱选择、波谱识别等。将会使用FLAASH工具、ENVI的波谱分析工具等。由于数据的原因,本课堂使用了两种数据AVIRIS和HyMap航空高光谱数据。以下所有操作在ENVI5 classic下完成,感兴趣的可以在ENVI5下操作。
ENVI下推荐使用的波谱识别流程(如图1所示)。大致可以分为五个部分:大气校正、数据维数判断、端元波谱选择、波谱识别和结果分析。
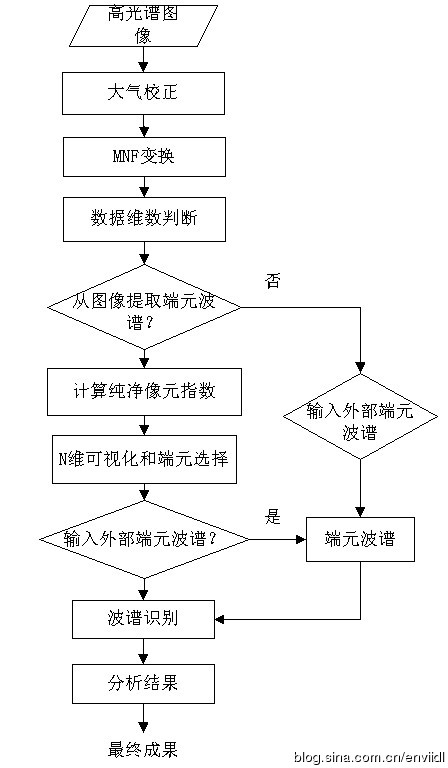 图 1波谱识别流程
图 1波谱识别流程
(1) 大气校正:使用FLAASH大气校正工具;
(2) 数据维数判断:对图像做MNF变换,根据特征值判断数据的维数;
(3) 端元波谱选择
端元波谱作为高光谱分类、地物识别和混合像元分解等过程中的参考波谱,与监督分类中的分类样本具有类似的作用,直接影响波谱识别与混合像元分解结果的精度。
最简单的端元波谱获取途径是选择已知的波谱,这些已知的波谱可以来自标准波谱库中的波谱,或者波谱仪器量测等;也可以从图像自身的像元波谱中获得,这些像元一般选择只包含一种地物的纯净像元;还常常采用前面两种方法相结合,即使用已知波谱校正和调整图像上获取的端元波谱。
可选择很多种方法,流程图上标识了两种方法——基于PPI的端元提取和从外部源(如波谱库)获取,也可以选择基于几何顶点的端元提取、基于SMACC的端元提取等方法;
(4) 波谱识别可选的方法就很多,如波谱角填图(SAM)、二进制编码(Binary Encoding )和光谱信息散度(Spectral Information Divergence)、线性波段预测(Linear Band Prediction)、线性波谱分离(Linear Spectral Unmixing )、匹配滤波(Matched Filtering )、混合调谐匹配滤波(Mixture Tuned Matched Filtering)、最小能量约束(Constrained Energy Minimization)、自适应一致估计(Adaptive Coherence Estimator)、正交子空间投影(Orthogonal Subspace Projection)、包络线去除(Continuum Removal)、光谱特征拟合(Spectral Feature Fitting)和多范围光谱特征拟合(Multi Range Spectral Feature Fitting)等。
(5) 分析结果。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d01014rhx.html
下载详细操作文档:http://vdisk.weibo.com/s/zrSeGYf9h2kXH
光学遥感技术的发展经历了:全色(黑白)—>彩色摄影—>多光谱扫描成像—>高光谱遥感四个历程。高光谱分辨率遥感(HyperspectralRemote Sensing)用很窄(10-2λ)而连续的光谱通道对地物持续遥感成像的技术。在可见光到短波红外波段其光谱分辨率高达纳米(nm)数量级,通常具有波段多的特点,光谱通道数多达数十甚至数百个以上,而且各光谱通道间往往是连续的,因此高光谱遥感又通常被称为成像光谱(Imaging Spectrometry)遥感。
高光谱图像分类很多地方也叫高光谱物质制图(Mapping),主要原理利用反映地物物理光学性质的光谱曲线来识别地物,即利用一种匹配方法,分析已知的波谱曲线(端元波谱)和高光谱图像每个像素波谱曲线(光谱剖面)匹配程度对图像进行分类。高光谱图像分类过程同时也是光谱识别的过程;用已知的波谱曲线去识别图像中的地物,这也是高光谱遥感最大的优点,可用于特定目标的识别和探测,其结果是“有”或者“没有”。
本课堂以航空高光谱数据为例介绍从高光谱的波谱识别过程,包括高光谱数据的预处理(大气校正)、高光谱数据维数判断和降维、端元波谱选择、波谱识别等。将会使用FLAASH工具、ENVI的波谱分析工具等。由于数据的原因,本课堂使用了两种数据AVIRIS和HyMap航空高光谱数据。以下所有操作在ENVI5 classic下完成,感兴趣的可以在ENVI5下操作。
ENVI下推荐使用的波谱识别流程(如图1所示)。大致可以分为五个部分:大气校正、数据维数判断、端元波谱选择、波谱识别和结果分析。
(1) 大气校正:使用FLAASH大气校正工具;
(2) 数据维数判断:对图像做MNF变换,根据特征值判断数据的维数;
(3) 端元波谱选择
端元波谱作为高光谱分类、地物识别和混合像元分解等过程中的参考波谱,与监督分类中的分类样本具有类似的作用,直接影响波谱识别与混合像元分解结果的精度。
最简单的端元波谱获取途径是选择已知的波谱,这些已知的波谱可以来自标准波谱库中的波谱,或者波谱仪器量测等;也可以从图像自身的像元波谱中获得,这些像元一般选择只包含一种地物的纯净像元;还常常采用前面两种方法相结合,即使用已知波谱校正和调整图像上获取的端元波谱。
可选择很多种方法,流程图上标识了两种方法——基于PPI的端元提取和从外部源(如波谱库)获取,也可以选择基于几何顶点的端元提取、基于SMACC的端元提取等方法;
(4) 波谱识别可选的方法就很多,如波谱角填图(SAM)、二进制编码(Binary Encoding )和光谱信息散度(Spectral Information Divergence)、线性波段预测(Linear Band Prediction)、线性波谱分离(Linear Spectral Unmixing )、匹配滤波(Matched Filtering )、混合调谐匹配滤波(Mixture Tuned Matched Filtering)、最小能量约束(Constrained Energy Minimization)、自适应一致估计(Adaptive Coherence Estimator)、正交子空间投影(Orthogonal Subspace Projection)、包络线去除(Continuum Removal)、光谱特征拟合(Spectral Feature Fitting)和多范围光谱特征拟合(Multi Range Spectral Feature Fitting)等。
(5) 分析结果。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d01014rhx.html

