
利用ENVI从Spot5影像中提取DEM
分享
-
2016-06-17
数字地面高程模型(Digital Elevation Models)是地表形态的数字形式,具有广泛的应用潜力。随着遥感技术的发展,利用遥感影像提取DEM已经得到广泛应用。用航天、航空遥感图像立体像对生成DEM,不仅数据更新快,而且能够获取不同比例尺要求的DEM。比如航空立体相对影像能够获取大比例尺的DEM数据,如1:1000、1:2000:1、1:5000等。大比例尺的DEM数据应用非常的广泛,如利用航空摄影测量的方法获取设计道路区域地形数据,在此数据基础上进行预科的道路选线和工程量的计算,接着,公路设计人员再进行实地勘测,能具体地确定公路的设计位置。
本文将利用ENVI软件从SPOT5立体像对影像中提取DEM进行数据实验。
1、Spot5影像特征介绍
Spot5影像数据是法国spot卫星获取的,能够通过相邻轨道拍摄立体相对影像,其分辨率为5m。本次实验的数据是相邻区域的的6景数据,其中266280-20030123HRS1文件是地形平缓的区域、266281-20030123HRS1和266282-20030123HRS1文件是地形起伏度较大的区域。由于是异轨获取的立体影像,使得立体影像中的同名点位置相差较大,尤其是山区,如图1。通过ENVI地理链接工具可以看到两幅图中A和B是在同一位置,但实际上A’与A是同名地物应该在同一位置,可以看出A’与B位置相差的很远。影像的这个特点决定了软件处理中的参数需要适当的更改。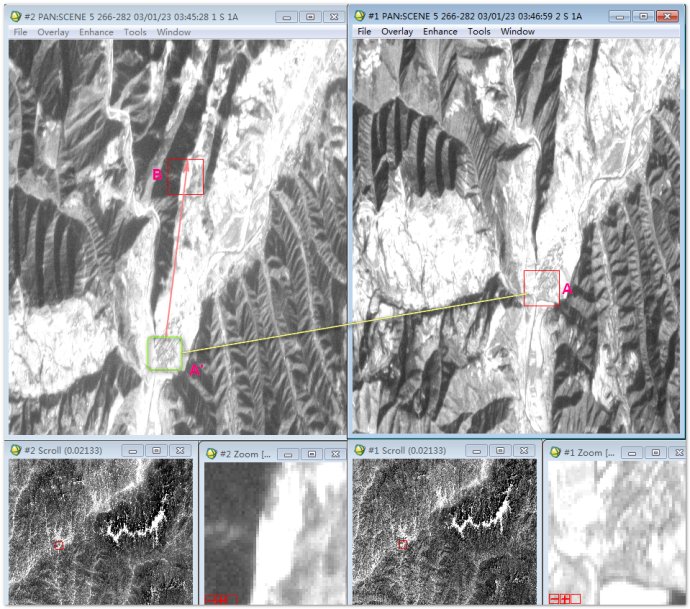
图1 立体像对影像中同名地物的位置偏差
2、DEM提取实验
利用ENVI的DEM提取模块,提取DEM信息。这是一个流程化的操作模块,根据标题提示设置参数后点击下一步,即可完成整个DEM提取的操作。ENVI可以从ALOS PRISM, ASTER, CARTOSAT-1, FORMOSAT-2, GeoEye-1, IKONOS, KOMPSAT-2, OrbView-3, QuickBird, WorldView-1, SPOT 1-5以及航空影像立体像对中提取DEM。主要流程如下:
第一步:输入立体像对
(1) 单击主菜单->File->Open External File->SPOT->DIMAP,打开266282-20030123HRS1\SCENE01\METADATA.DIM和266282-20030123HRS2\SCENE01\METADATA.DIM数据。打开的数据在波段列表中显示,如图2.
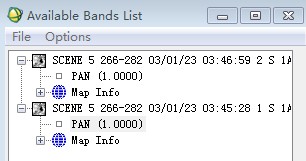 图2 数据列表
图2 数据列表
(2) 单击主菜单->Topographic->DEM Extraction-> DEM Extraction Wizard->New,单击Select Stereo Image按钮,选择左影像(left image )和右影像(right image),如图3所示,单击Next按钮。
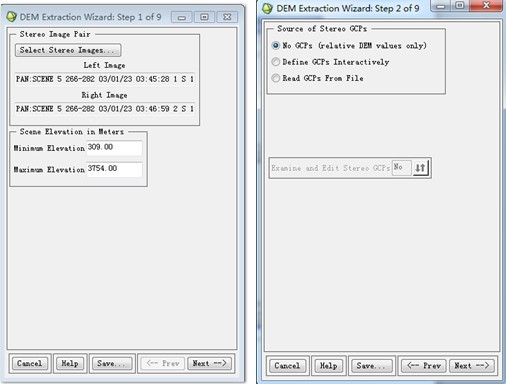
图3 选择左右影像以及控制点方式
第二步:定义地面控制点
提供三种定义地面控制点方式:不定义、交互式定义和读取控制点文件。这里选择不定义控制点,单击Next按钮。
注:不定义地面控制点得到的DEM是相对高程。
第三步:定义连接点
(1) 提供三种定义连接点方式:自动寻找、交互式手工定义和外部读取控制点文件。选择选择自动寻找,如图4所示。
(2) 连接点数目(Number of Tie Points):100。
(3) 搜索窗口大小(Search Windows Size):400。
(4) 移动窗口大小(Moving Window Size):119。
(5) 平均高程(Region Elevation):自动从影像读取。
(6) 是否检查连接点(Examine and Edit Tie Points):Yes
(7) 单击Next按钮,进入查看/添加/编辑连接点步骤。
(8) 单击Show Table,选择Sort Table By Error,误差大的点排在前面,逐个选择Tie点查看精度,将偏离较大的点进行微调或者直接删除。
(9) 自动寻找的Tie点分布有间隙,手动增加一些点,充分利用Predict Left(或Right)预测功能可以提高效率。
(10) 当误差达到一定范围(Maximum Y Parallax<10,越小越好),单击Next按钮。
注:搜索窗口和移动窗口值设置的都比较大,将两图显示在Display中,并用geographic link进行地理定位(RPC文件位置),发现两个图像的地理位置偏差比较大。故这里设置的值都比较大,保证在每个搜索窗口中有同名点。(可以利用basic tools——measurement tool,测量两点间的距离h个像素,搜索窗口的最小值为2*(h+1)。)
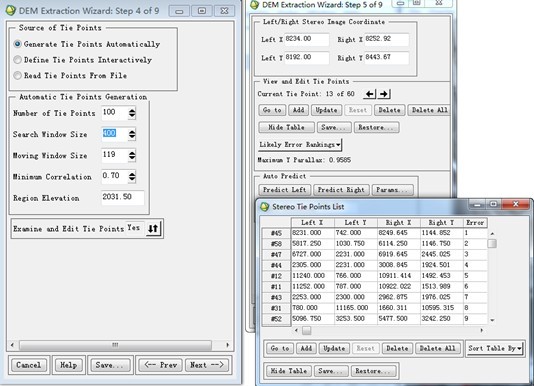 图4 Tie点的选择与调整
图4 Tie点的选择与调整
第四步:设定DEM提取参数
(1) ENVI会生成核线图像,可以用于立体观测,选择一个路径分别输出,单击Next。
(2) 设置DEM输出投影参数。这里直接设置为UTM坐标,输出像元大小为5m(记得回车自动计算输出像元行列数),这里可以改成经纬度投影,单击Next。
(3) 设置DEM输出参数,根据需求设置背景值,地形精细程度等参数,如图5所示。
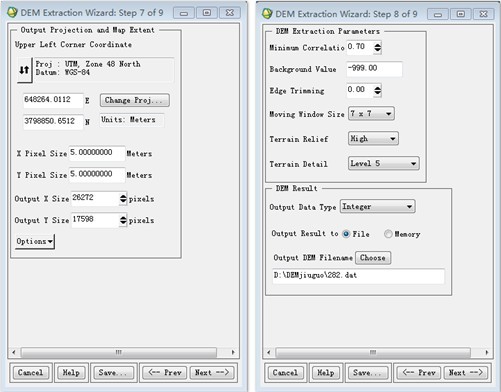 图5 DEM输出投影与输出参数设置
图5 DEM输出投影与输出参数设置
第五步:输出DEM并检查结果
将得到的DEM在三维场景下查看。
第六步:编辑DEM
生成的DEM有些地方如厚云等,对获得的地形有影响,需要手动更改这些区域的高程数据。
最好将整个流程保存为工程文件,以备下次使用。
3、结果检验
结果的精度检验是最重要的。最简单的方式就是将遥感影像叠加到DEM(图6)上进行三维展示,查看一些明显地物是否在正确的位置,如湖泊不可能在山顶上等。这个工作可以在ENVI中完成,但要注意在叠加显示之前,一定要利用生成的DEM结果对原始影像进行正射校正,用校正过后的影像叠加DEM才是符合要求和生产需求的(图9)。为了更加真实的展现三维效果,可以将DEM数据导入到ArcGlobe中进行三维展示,因为ArcGlobe中本身自带有高分辨率的真彩色影像地图(图10、11),同样的也可以将经过正射校正的影像数据加载到ArcGlobe中和真彩色影像地图结合来验证提取的DEM精度(图12)。
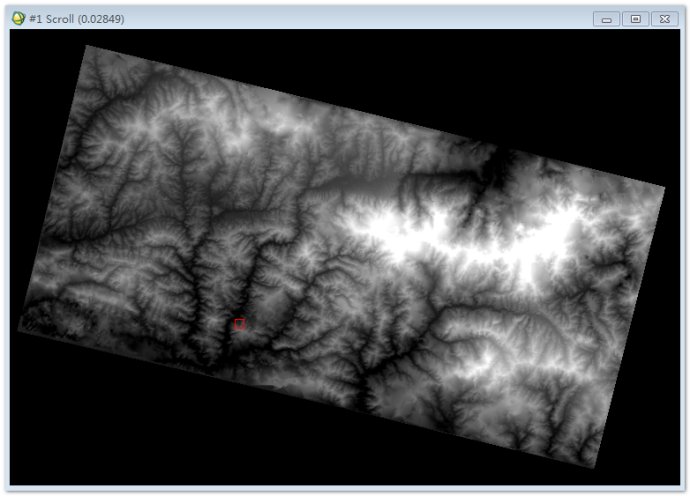 图6 提取的DEM结果图
图6 提取的DEM结果图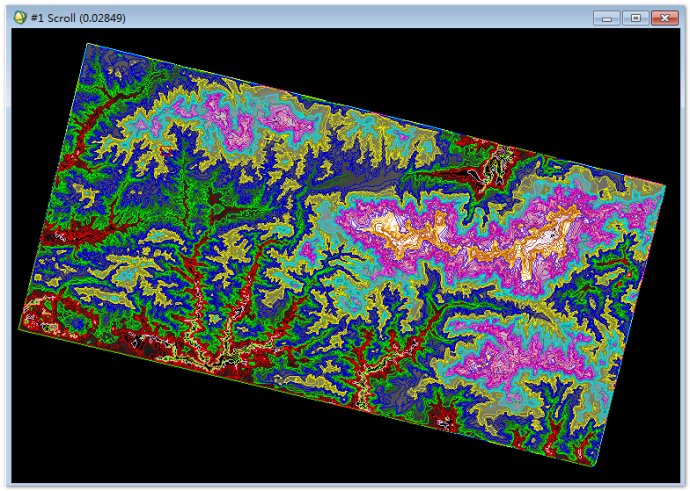
图7 由DEM生成的等高线图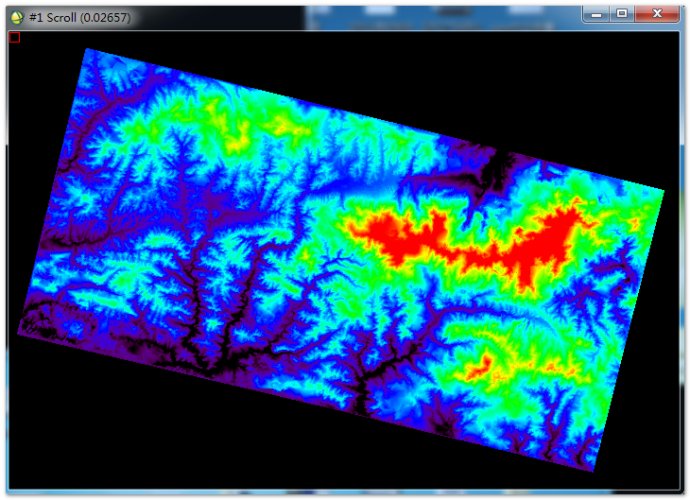
图8 DEM渲染图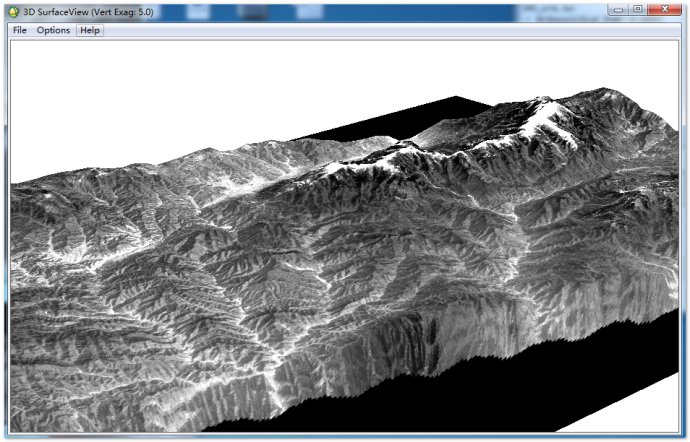
图9 (ENVI下)经过正射校正后的影像图与DEM叠加三维展示效果
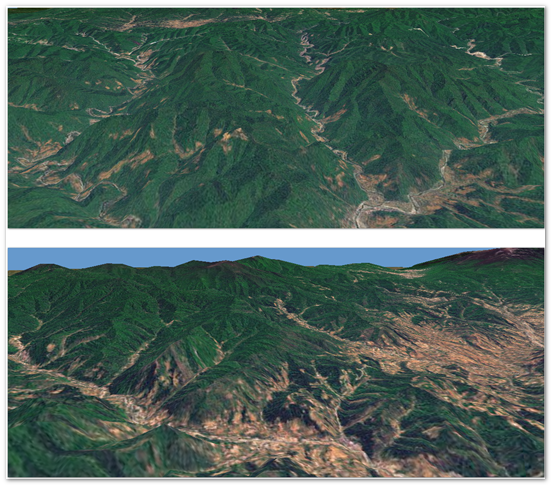
图10 在ArcGloble下进行三维展示(DEM夸张2倍)效果(局部区域)
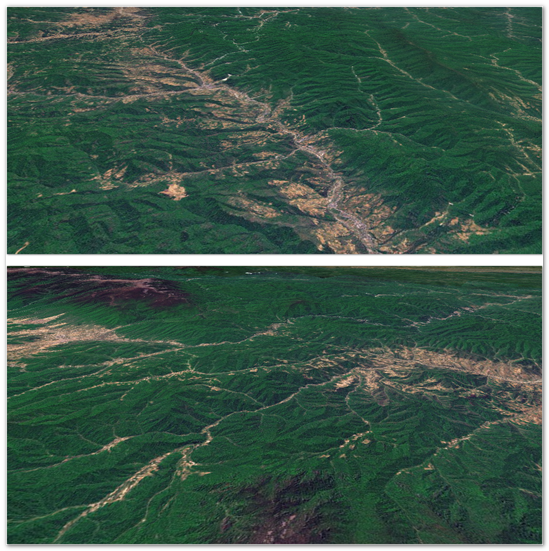
图11 在ArcGloble下进行三维展示(DEM未夸张)效果(局部区域)
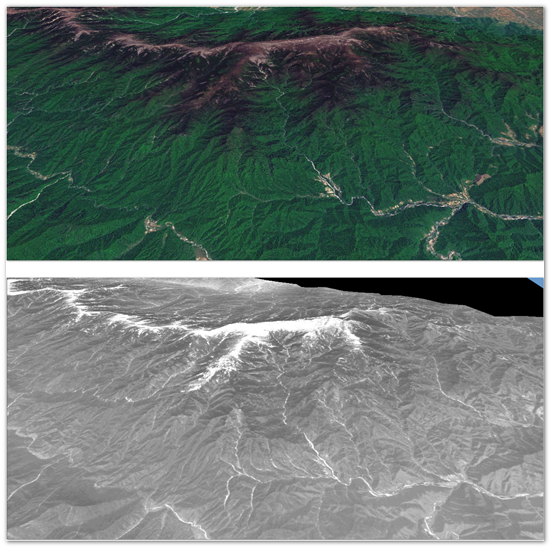
图12 同一区域SPOT数据和arcglobe底图数据的三维展示
通过三维叠加显示分析,从SPOT影像中提取的DEM信息在平坦地区的精度较高,在地形起伏剧烈的地区精度有所下降,但高程相差不大。如果能添加地面控制点信息,对提取的DEM结果精度会有很大帮助。
同样的为了更加有效的验证提取的DEM精度,需要结合实际的地面点来进行评估。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0100sank.html
本文将利用ENVI软件从SPOT5立体像对影像中提取DEM进行数据实验。
1、Spot5影像特征介绍
Spot5影像数据是法国spot卫星获取的,能够通过相邻轨道拍摄立体相对影像,其分辨率为5m。本次实验的数据是相邻区域的的6景数据,其中266280-20030123HRS1文件是地形平缓的区域、266281-20030123HRS1和266282-20030123HRS1文件是地形起伏度较大的区域。由于是异轨获取的立体影像,使得立体影像中的同名点位置相差较大,尤其是山区,如图1。通过ENVI地理链接工具可以看到两幅图中A和B是在同一位置,但实际上A’与A是同名地物应该在同一位置,可以看出A’与B位置相差的很远。影像的这个特点决定了软件处理中的参数需要适当的更改。
图1 立体像对影像中同名地物的位置偏差
2、DEM提取实验
利用ENVI的DEM提取模块,提取DEM信息。这是一个流程化的操作模块,根据标题提示设置参数后点击下一步,即可完成整个DEM提取的操作。ENVI可以从ALOS PRISM, ASTER, CARTOSAT-1, FORMOSAT-2, GeoEye-1, IKONOS, KOMPSAT-2, OrbView-3, QuickBird, WorldView-1, SPOT 1-5以及航空影像立体像对中提取DEM。主要流程如下:
第一步:输入立体像对
(1) 单击主菜单->File->Open External File->SPOT->DIMAP,打开266282-20030123HRS1\SCENE01\METADATA.DIM和266282-20030123HRS2\SCENE01\METADATA.DIM数据。打开的数据在波段列表中显示,如图2.
(2) 单击主菜单->Topographic->DEM Extraction-> DEM Extraction Wizard->New,单击Select Stereo Image按钮,选择左影像(left image )和右影像(right image),如图3所示,单击Next按钮。
图3 选择左右影像以及控制点方式
第二步:定义地面控制点
提供三种定义地面控制点方式:不定义、交互式定义和读取控制点文件。这里选择不定义控制点,单击Next按钮。
注:不定义地面控制点得到的DEM是相对高程。
第三步:定义连接点
(1) 提供三种定义连接点方式:自动寻找、交互式手工定义和外部读取控制点文件。选择选择自动寻找,如图4所示。
(2) 连接点数目(Number of Tie Points):100。
(3) 搜索窗口大小(Search Windows Size):400。
(4) 移动窗口大小(Moving Window Size):119。
(5) 平均高程(Region Elevation):自动从影像读取。
(6) 是否检查连接点(Examine and Edit Tie Points):Yes
(7) 单击Next按钮,进入查看/添加/编辑连接点步骤。
(8) 单击Show Table,选择Sort Table By Error,误差大的点排在前面,逐个选择Tie点查看精度,将偏离较大的点进行微调或者直接删除。
(9) 自动寻找的Tie点分布有间隙,手动增加一些点,充分利用Predict Left(或Right)预测功能可以提高效率。
(10) 当误差达到一定范围(Maximum Y Parallax<10,越小越好),单击Next按钮。
注:搜索窗口和移动窗口值设置的都比较大,将两图显示在Display中,并用geographic link进行地理定位(RPC文件位置),发现两个图像的地理位置偏差比较大。故这里设置的值都比较大,保证在每个搜索窗口中有同名点。(可以利用basic tools——measurement tool,测量两点间的距离h个像素,搜索窗口的最小值为2*(h+1)。)
第四步:设定DEM提取参数
(1) ENVI会生成核线图像,可以用于立体观测,选择一个路径分别输出,单击Next。
(2) 设置DEM输出投影参数。这里直接设置为UTM坐标,输出像元大小为5m(记得回车自动计算输出像元行列数),这里可以改成经纬度投影,单击Next。
(3) 设置DEM输出参数,根据需求设置背景值,地形精细程度等参数,如图5所示。
第五步:输出DEM并检查结果
将得到的DEM在三维场景下查看。
第六步:编辑DEM
生成的DEM有些地方如厚云等,对获得的地形有影响,需要手动更改这些区域的高程数据。
最好将整个流程保存为工程文件,以备下次使用。
3、结果检验
结果的精度检验是最重要的。最简单的方式就是将遥感影像叠加到DEM(图6)上进行三维展示,查看一些明显地物是否在正确的位置,如湖泊不可能在山顶上等。这个工作可以在ENVI中完成,但要注意在叠加显示之前,一定要利用生成的DEM结果对原始影像进行正射校正,用校正过后的影像叠加DEM才是符合要求和生产需求的(图9)。为了更加真实的展现三维效果,可以将DEM数据导入到ArcGlobe中进行三维展示,因为ArcGlobe中本身自带有高分辨率的真彩色影像地图(图10、11),同样的也可以将经过正射校正的影像数据加载到ArcGlobe中和真彩色影像地图结合来验证提取的DEM精度(图12)。
图7 由DEM生成的等高线图
图8 DEM渲染图
图9 (ENVI下)经过正射校正后的影像图与DEM叠加三维展示效果
图10 在ArcGloble下进行三维展示(DEM夸张2倍)效果(局部区域)
图11 在ArcGloble下进行三维展示(DEM未夸张)效果(局部区域)
图12 同一区域SPOT数据和arcglobe底图数据的三维展示
通过三维叠加显示分析,从SPOT影像中提取的DEM信息在平坦地区的精度较高,在地形起伏剧烈的地区精度有所下降,但高程相差不大。如果能添加地面控制点信息,对提取的DEM结果精度会有很大帮助。
同样的为了更加有效的验证提取的DEM精度,需要结合实际的地面点来进行评估。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0100sank.html

