
利用LiDAR在巴格达市选择直升机降落位置
分享
-
2016-06-16
使用激光雷达数据和遥感图像分析黑鹰直升机的着落地点,寻找着落点的步骤为:
(1) 排除靠近高垂直障碍物和水体区域
(2) 排除过多斜坡的区域
(3) 综合所有的已排除区域
(4) 最终寻找合适区域
一、LiDAR数据
LiDAR (Light Detection and Ranging),是激光探测及测距系统的简称,它使用激光对地球表面密集采样,产生高精度(X、Y、Z)三维坐标值。得到的是一个“点云”数据。电磁波段范围在532~1550nm之间。采集方式:机载、地面、移动设备。
LiDAR数据经过预处理之后可以转变为高程栅格数据,从LiDAR点云数据中可以获取DEM、DTM、DSM、和强度图像等。
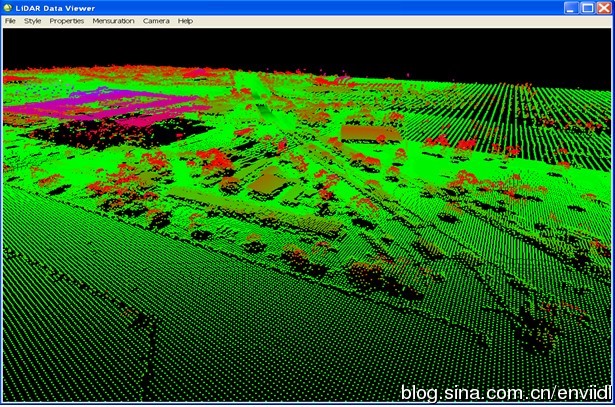 图1:点云数据浏览
图1:点云数据浏览
二、处理与分析过程
下面以图文形式介绍整个过程。
(1) 生成DTM和DSM数据
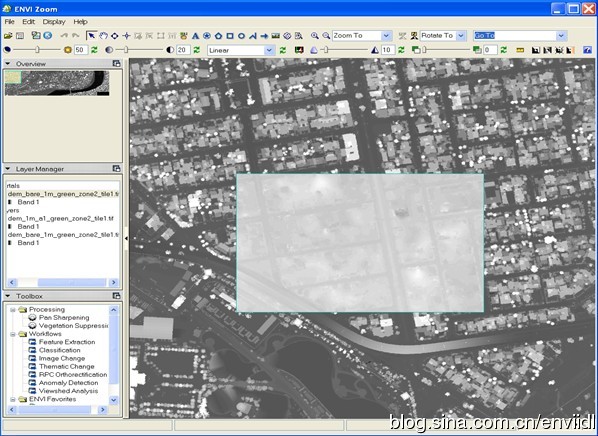
图2:从LiDAR中生成的DTM数据
(2) 生成地表物体高度图
DSM–DTM 即可获取地表物体高度图。
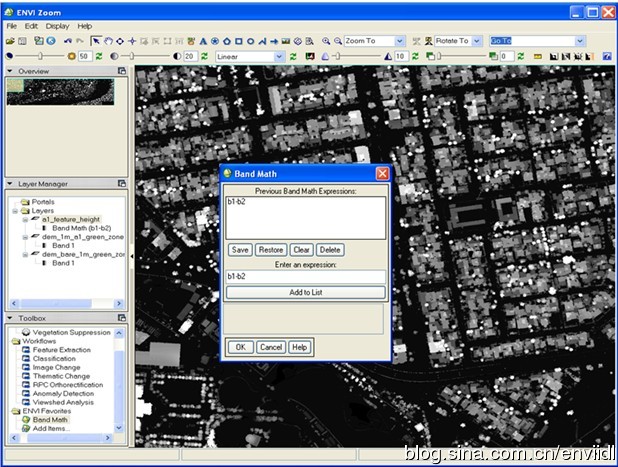
图3:地表物体高度图
(3) 过滤太高的地表物体
过滤掉拥有2m以上的建筑物的区域,并建立10m半径的缓冲区。
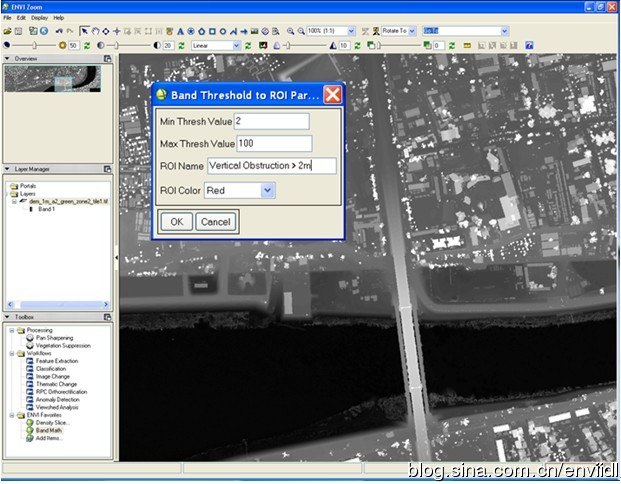
图4:过滤大于指定高度的地表物体
(4) 去掉水体区域
水面区域不能作为着落点,进行掩膜处理。

图5:掩膜水体区域
(5) 去掉坡度过大的区域
从DEM中计算坡度图,之后过滤掉坡度大于15度的区域,并生成10米范围内的缓冲区。
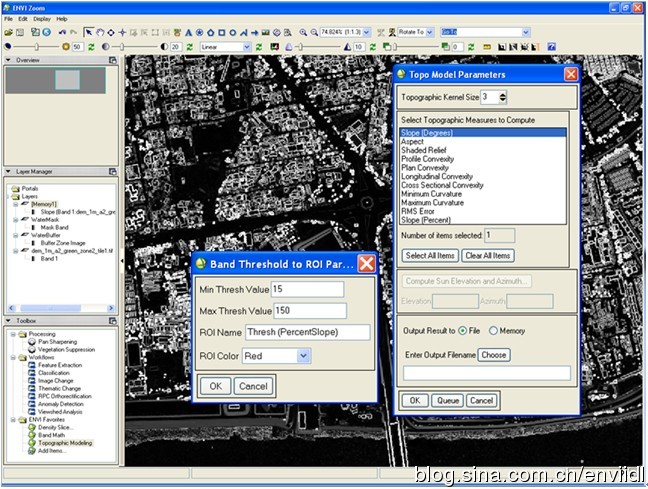
图6:过滤大于15度区域
(6) 组合区域
对前面获取的两个区域进行组合生成一副地面物体高度小于2米,坡度小于15度,并进行了10米缓冲区分析的图像。
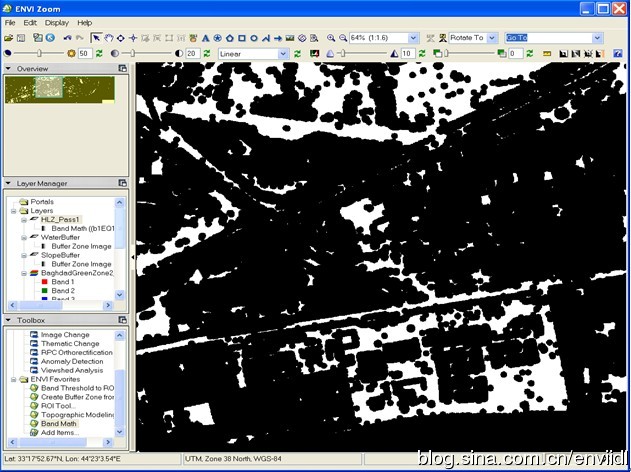
图7:组合后的图像
(7) 选出着落区域
根据黑鹰直升机需要50米半径大小着落区的需求,得到可着落区域。
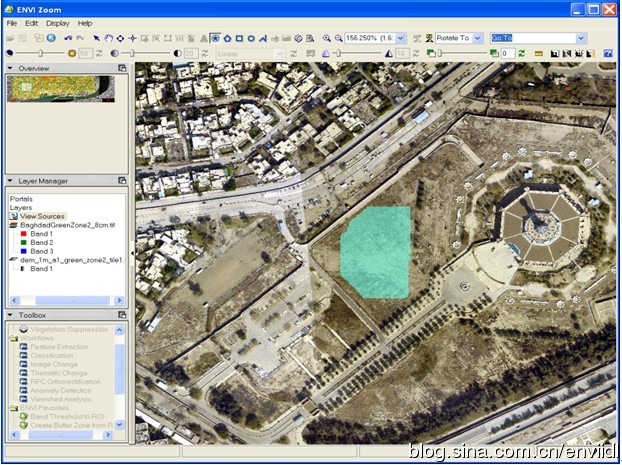
图8:50米半径的着落区域
(8) 使用光学影像验证结果
将得到的着落点叠加在高分辨率的光学影像上验证结果。
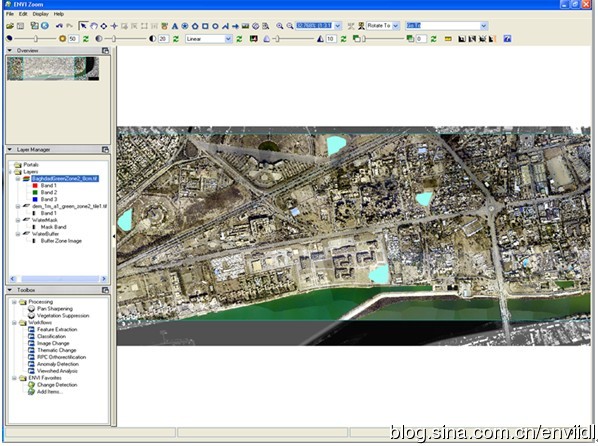 图9:通过影像检查所有着落区域
图9:通过影像检查所有着落区域
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0101255f.html
(1) 排除靠近高垂直障碍物和水体区域
(2) 排除过多斜坡的区域
(3) 综合所有的已排除区域
(4) 最终寻找合适区域
一、LiDAR数据
LiDAR (Light Detection and Ranging),是激光探测及测距系统的简称,它使用激光对地球表面密集采样,产生高精度(X、Y、Z)三维坐标值。得到的是一个“点云”数据。电磁波段范围在532~1550nm之间。采集方式:机载、地面、移动设备。
LiDAR数据经过预处理之后可以转变为高程栅格数据,从LiDAR点云数据中可以获取DEM、DTM、DSM、和强度图像等。
二、处理与分析过程
下面以图文形式介绍整个过程。
(1) 生成DTM和DSM数据
图2:从LiDAR中生成的DTM数据
(2) 生成地表物体高度图
DSM–DTM 即可获取地表物体高度图。
图3:地表物体高度图
(3) 过滤太高的地表物体
过滤掉拥有2m以上的建筑物的区域,并建立10m半径的缓冲区。
图4:过滤大于指定高度的地表物体
(4) 去掉水体区域
水面区域不能作为着落点,进行掩膜处理。
图5:掩膜水体区域
(5) 去掉坡度过大的区域
从DEM中计算坡度图,之后过滤掉坡度大于15度的区域,并生成10米范围内的缓冲区。
图6:过滤大于15度区域
(6) 组合区域
对前面获取的两个区域进行组合生成一副地面物体高度小于2米,坡度小于15度,并进行了10米缓冲区分析的图像。
图7:组合后的图像
(7) 选出着落区域
根据黑鹰直升机需要50米半径大小着落区的需求,得到可着落区域。
图8:50米半径的着落区域
(8) 使用光学影像验证结果
将得到的着落点叠加在高分辨率的光学影像上验证结果。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0101255f.html
