
ENVI中基于SuperView-1立体像对数据提取DSM和点云数据
分享
-
2017-01-01
ENVI 5.4的摄影测量扩展模块(原正射校正扩展模块)增加了两个工具,分别为:
*注:以上两个工具需要摄影测量扩展模块许可支持。
工具的使用非常简单,默认参数即可,下面做简单介绍。
工具1
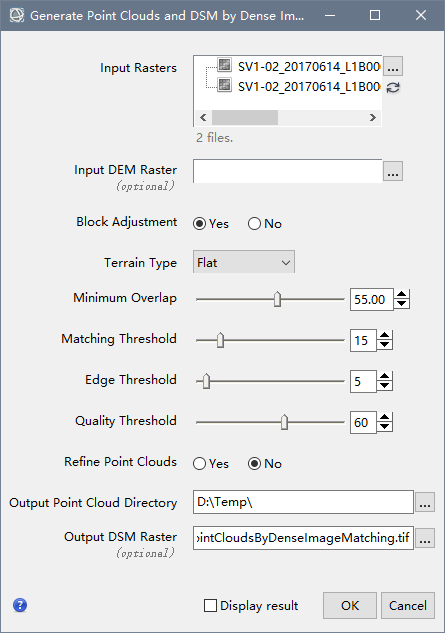
位于Toolbox/Terrain/Generate Point Clouds and DSM by Dense Image Matching
参数介绍:
工具2
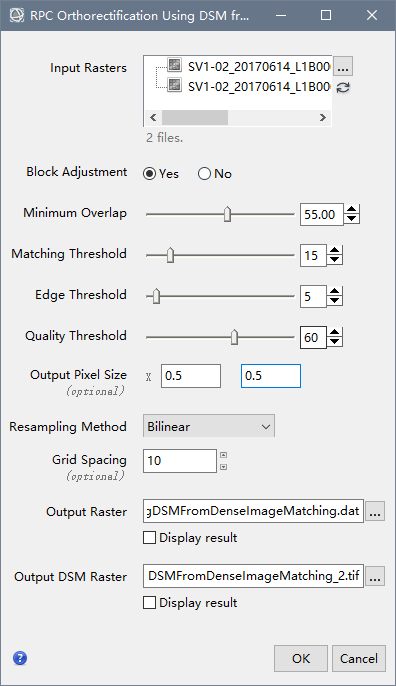
位于/Geometric Correction/Orthorectification/RPC Orthorectification Using DSM from Dense Image Matching
参数介绍:
前6个参数与工具1一致,请参考上文。
美图欣赏
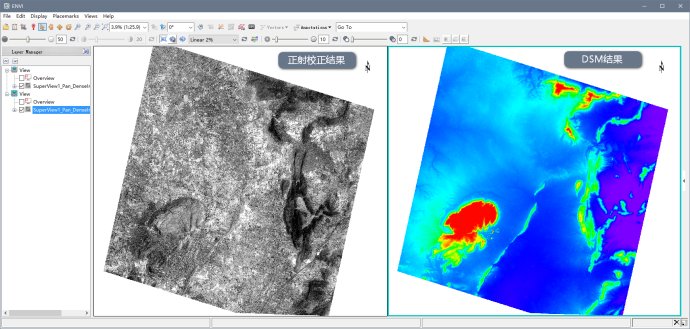
全色立体像对得到的正射结果和提取的DSM(空间分辨率为1米)。
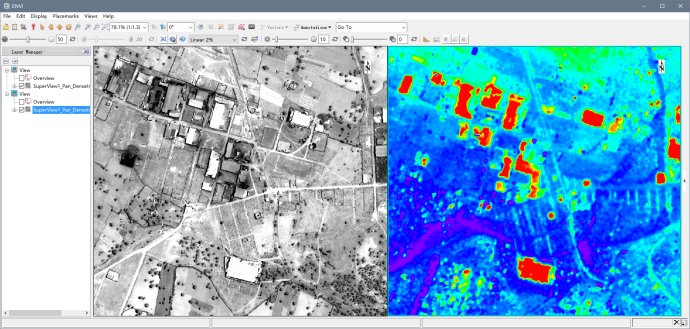
细节欣赏:
提取的点云数据:

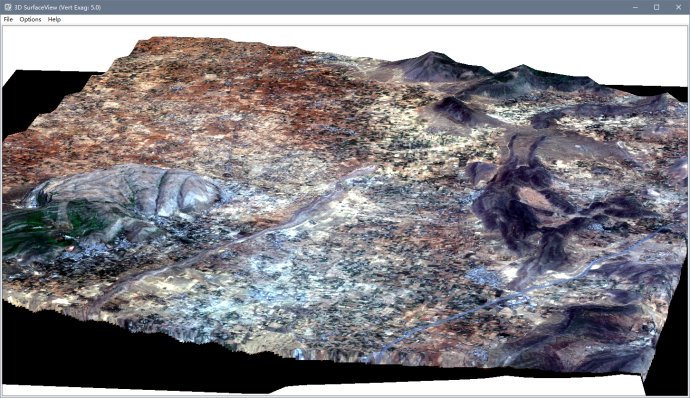
SuperView-1同时提供了多光谱立体像对,同样可以提取DSM(空间分辨率为2.5米)。多光谱正射校正结果叠加DSM效果如下图所示。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0102y7t2.html
- Generate Point Clouds and DSM by Dense Image Matching——利用高重叠度的多景图像(例如立体像对)提取点云数据和DSM。
- RPC Orthorectification Using DSM from Dense Image Matching——利用高重叠度的多景图像(例如立体像对)提取点云数据和DSM。并基于此DSM对输入栅格图像进行正射校正。
*注:以上两个工具需要摄影测量扩展模块许可支持。
工具的使用非常简单,默认参数即可,下面做简单介绍。
工具1
位于Toolbox/Terrain/Generate Point Clouds and DSM by Dense Image Matching
参数介绍:
- Input Rasters:输入高重叠度的多景图像,例如立体像对数据;
- Input DEM Raster:可选项,输入DEM数据;
- Block Adjustment:是否进行区域网平差,默认Yes;
- Terrain Type:两个选项,分别为Flat、Mountainous。根据实际情况选择;
- Minimum Overlap:指定两景图像之间的最小重叠度。当某两景图像的重叠度小于此值时将被忽略。有效范围为0-100,默认55。
- Matching Threshold:此值表示匹配误差,0代表完美匹配。默认值为15。设置此值越小,越能提高可信度并减少误匹配;设置此值越大,将有助于捕捉细节,但是有可能造成过度误匹配。
- Edge Threshold:有效范围0-100,默认值为5。此关键字不太好翻译,请自行理解(Set a lower value to include more mismatches in areas with poor contrast. Set a higher value to force rich texture and edge information in accepted matches)。
- Quality Threshold:质量阈值,有效范围0-100,默认值为60。每个像元会进行质量检查,主要基于匹配窗口图像的相似程度。质量检查有助于提升位于特征边缘的像元的精度。设置此值为0将导致估算所有匹配像元的高度,并生成很大的点云(LAS)数据,有可能包含很多冗余的、错误的点云数据。增加此阈值,将生成较少匹配点(和较小的LAS文件),但是点云质量较好。默认值60是一个可靠的、合理的阈值,可以生成高质量点云数据。设置更高的值将导致点云密度稀疏,并有可能存在数据空缺的情况。
- Refine Point Clouds:如果设置为Yes,输出的点云数据高度会被平滑处理,但是将丢失亮度或颜色信息。
- Output Point Cloud Directory:设置输出点云数据的路径。将在此路径下生成多个las文件。可在ENVI LiDAR中同时打开这些las文件。
- Output DSM Raster:设置输出DSM文件路径,TIFF格式。
工具2
位于/Geometric Correction/Orthorectification/RPC Orthorectification Using DSM from Dense Image Matching
参数介绍:
前6个参数与工具1一致,请参考上文。
- Output Pixel Size:输出正射校正结果的空间分辨率。
- Resampling Method:重采样方法。
- Grid Spacing:正射校正控制点像元间隔,默认为10,单位像元。此值越大,正射校正效率越高,但是精度越差。设置此值为1,并使用高精度DEM时,将执行严格正射校正。
- Output Raster:设置输出正射校正结果文件名。
- Output DSM Raster:设置输出DSM结果文件名。
美图欣赏
全色立体像对得到的正射结果和提取的DSM(空间分辨率为1米)。
细节欣赏:
提取的点云数据:
SuperView-1同时提供了多光谱立体像对,同样可以提取DSM(空间分辨率为2.5米)。多光谱正射校正结果叠加DSM效果如下图所示。
文章来源:http://blog.sina.com.cn/s/blog_764b1e9d0102y7t2.html
1 个评论
这个误差有多大,和别的软件比有什么优势吗

